Publicado por: Fernanda Almeida 8 anos, 4 meses atrás
O que é Encoder?
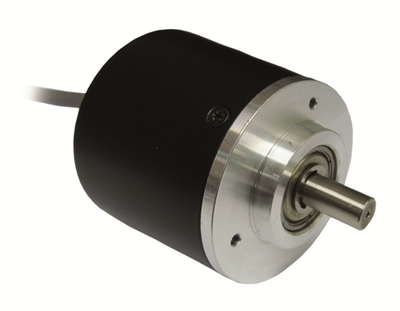
Encoder são dispositivos/sensores eletro-mecânicos, cuja funcionalidade é transformar posição em sinal elétrico digital. Com a utilização de encoders, é possível quantizar distâncias, controlar velocidades, medir ângulos, número de rotações, realizar posicionamentos, rotacionar braços robóticos e etc.
O encoder é composto basicamente por um disco com marcações, um componente emissor e um receptor. Os encoder ópticos utilizam led como o componente emissor e um sensor photodetector como o receptor.
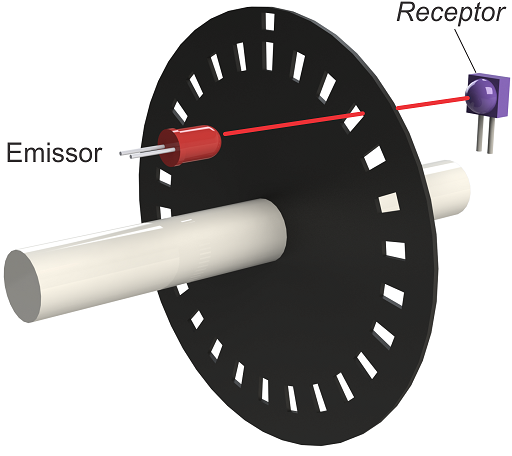
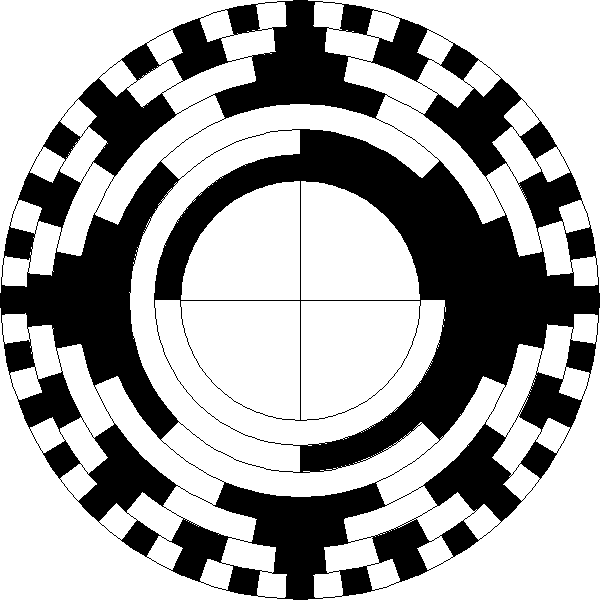
As marcações no disco possuem a funcionalidade de bloqueio e desbloqueio do feixe de luz do led para o photodetector, desse modo a medida que o disco vai girando o photodetector juntamente com um circuito eletrônico repassa para as saídas do encoder um sinal em forma de uma onda quadrada, proporcional ao número de marcações do encoder, de acordo com a resolução do mesmo. Logo, a resolução do encoder é o número de marcações presentes no disco do dispositivo, que equivale a quantidade de ondas quadradas, ou clock, gerado em uma volta do encoder.
 |
 |
 |
 |
 |
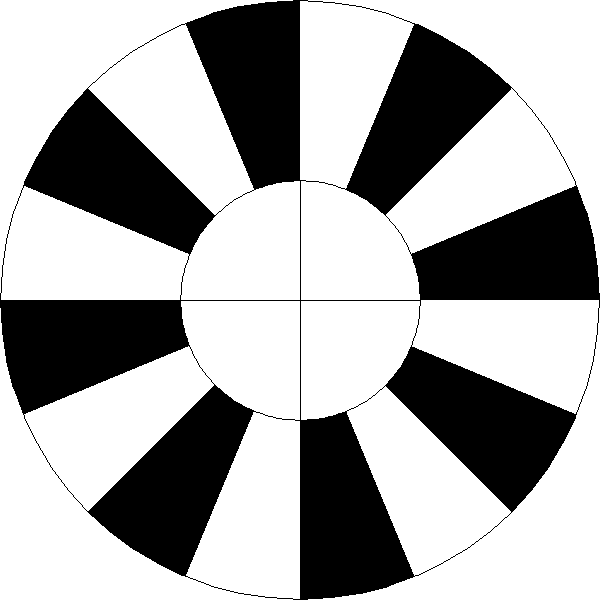
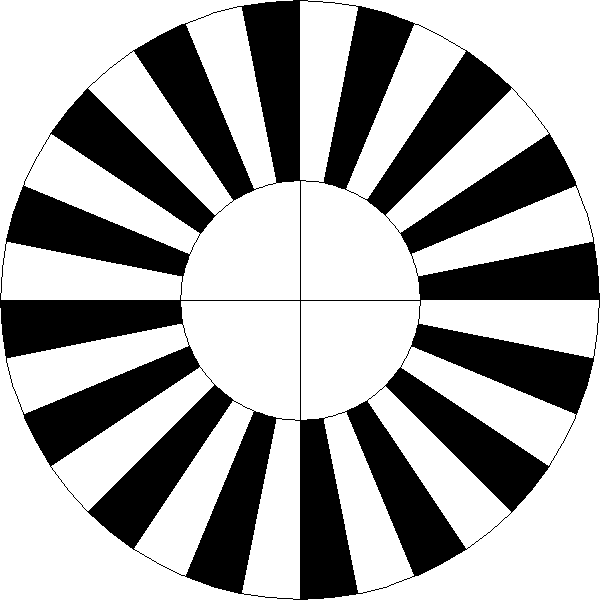
| Disco de resolução de 16 pulsos/volta | Disco de resolução de 32 pulsos/volta | Disco de resolução de 64 pulsos/volta | Disco de resolução de 128 pulsos/volta | Disco de resolução de 516 pulsos/volta |
O encoder óptico incremental, o mais comum do mercado, possui 3 sinais de saída: "A", "B" e "O". Com esses sinais adquire-se o ângulo de rotação, o sentido da rotação e o início/fim de uma volta. O sinal A é o sinal principal, que fornece os pulsos (ou clock) a medida que o encoder gira. O sinal B é equivalente ao sinal A, porém defasado em + ou -90°, cujo objetivo é sinalizar o sentido da rotação, e o sinal O (ou Z ou I) indica o início de uma revolução.
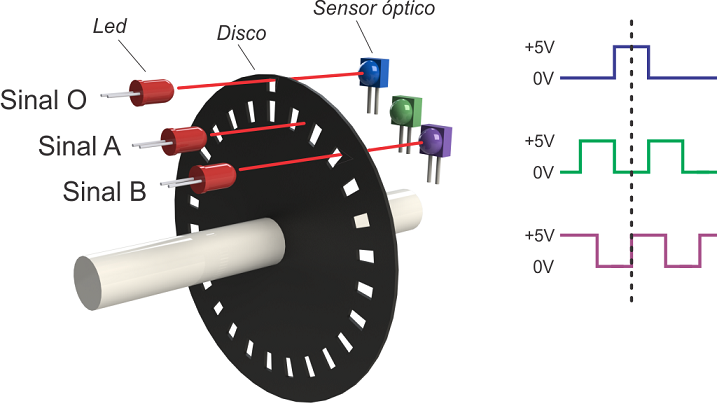
Quando o sinal B estiver adiantado em 90º do sinal A, o encoder gira no sentido anti-horário, neste caso a borda de subida de um sinal A se encontra com o sinal B no estado 1, analogamente, quando a B estiver em 0 durante a borda de subida do sinal A, o encoder estará girando no sentido horário.
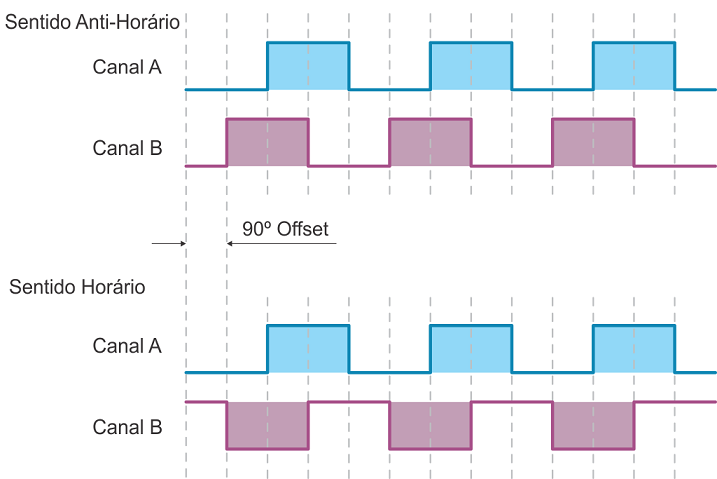
O terceiro sinal do encoder, o sinal O ou Z ou I, tem por objetivo indicar a posição "0" (zero) do encoder, com essa informação é possível detectar o número de voltas completas que o dispositivo acoplado ao encoder gerou.
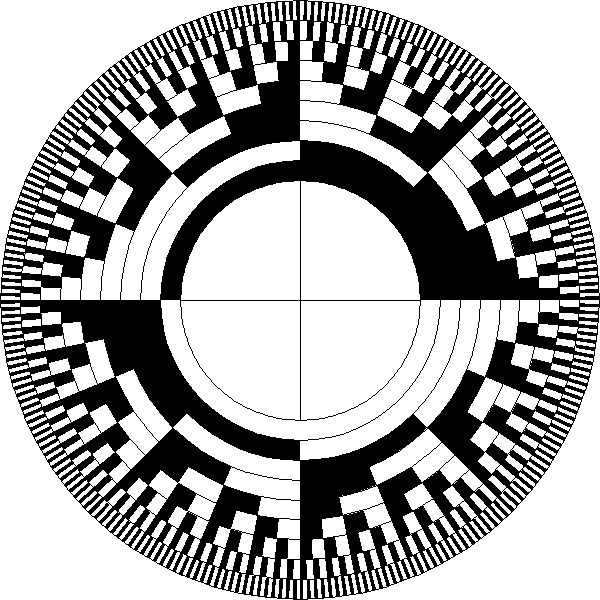
| |
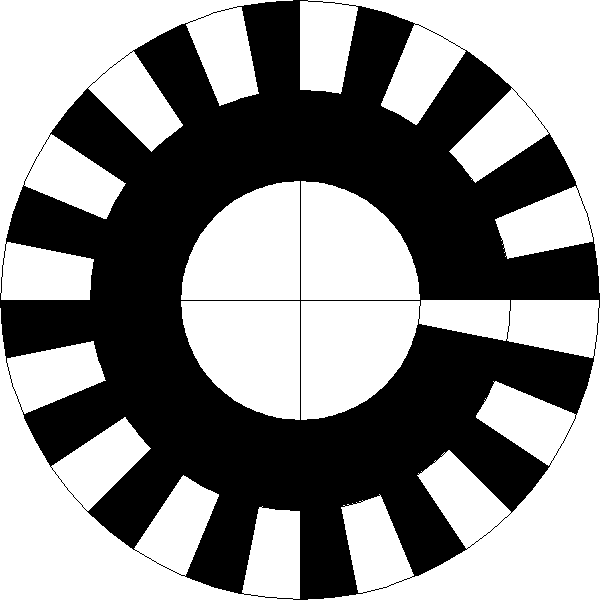 |
| Disco de resolução de 32 pulsos/volta, sem sinal de sincronismo | Disco de resolução de 32 pulsos/volta, com sinal de sincronismo |
Tipos de Encoders
Há vários tipos de encoder com diferentes tecnologias. O encoder exemplificado acima é o encoder óptico incremental.
Sinais de Saídas do Encoder
Com relação aos sinais de saídas do dispositivos, temos o encoder incremental e o absoluto.
Encoder Incremental: Indica a posição relativa ao ponto onde o encoder foi ativado. Pode possuir as 3 saídas A, B e Z ou pode ser do tipo diferencial com os sinal A, /A, B, /B, Z e /Z.
Encoder Absoluto: São encoders mais complexos, e mais caros. Indicam a posição absoluta através de saídas digitais codificadas em um valor binário ou via comunicação.
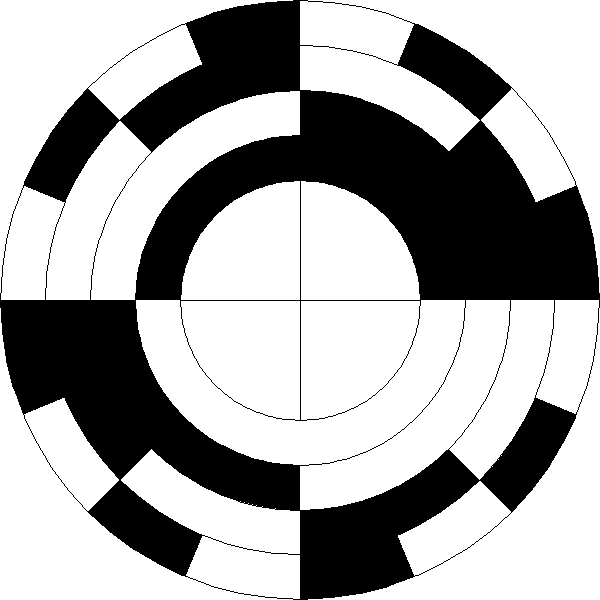
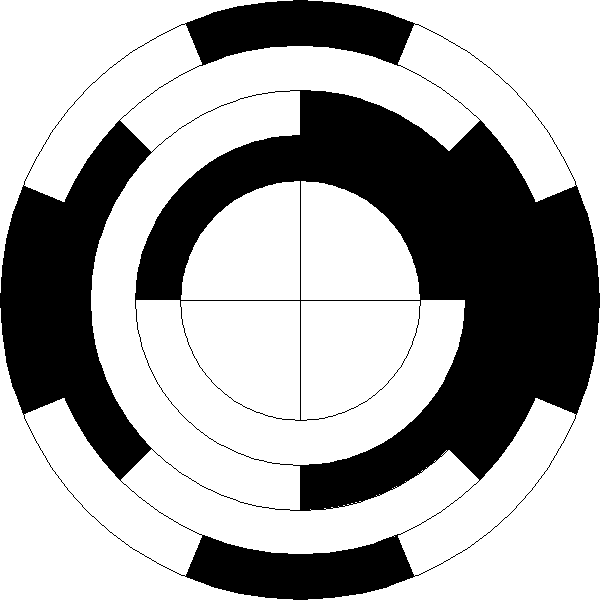
A resolução é representada em bits que correspondem ao número de faixas disponíveis no sensor, por exemplo como um encoder absoluto de 4 bits irá gerar uma representação de posição absoluta de 16 valores. A grande vantagem do encoder absoluto é que, em qualquer momento, independente, por exemplo, de uma queda de energia, é possível saber a posição do dispositivo sem necessidade de resincronizar a posição.
|
Discos de Encoders Absolutos |
|||
 |
 |
 |
 |
| 4 bits, 16 posições, em código binário. | 4 bits, 16 posições, em código gray. | 7 bits, 128 posições, em código gray. | 9 bits, 512 posições, em código binário. |
Tecnologias de Detecção
Há diferentes componentes que podem ser utilizados como o emissor e o receptor de um encoder. Os encoder ópticos utilizam led e photodetector, os encoder magnéticos utilizam o imãs e sensores de efeito hall em variadas configurações. Os magnéticos são mais utilizados em condições não ideais, como alta temperatura, poeira, umidade e vibração.
Utilizando o encoder em sua aplicação
Como escolher e calcular o encoder ideal?
A HI Tecnologia possui controladores capazes de interfacear com encoders incrementais, tais como o ZAP91X, P7C (módulo CDM711 e CDM715) e NEON. Para selecionar o encoder ideal é importante saber qual a precisão (número de pulsos) que será necessária para sua aplicação e a frequência máxima do encoder. Por exemplo, suponhamos que um encoder será acoplado a um motor que controlará uma esteira, a relação do deslocamento da esteira com o motor, para o nosso exemplo será de 0,5 metro por volta, ou seja, a cada 1 revolução do encoder, 360 graus, a esteira avança 50 cm. A velocidade máxima da esteira será de 1m/seg, equivalente a 2 voltas por segundo ou 120rpm no eixo do encoder.
Se utilizarmos um encoder de 1024 pulsos teremos a precisão de aproximadamente 0,5 cm da esteira, o que para muitas aplicações é razoável, caso necessite de mais precisão, basta utilizar um encoder com maior número de pulsos, como 2048, 4096 e etc. Com um encoder de 1024 pulsos e uma velocidade máxima de 2 voltas por segundo a frequência máxima dos sinais do encoder será de aproximadamente 2kHz.
Na HI Tecnologia temos suporte para a utilização de enconder. Conheça nossa linha de CLP's e veja qual se encaixa melhor no seu projeto.
Como interfacear?
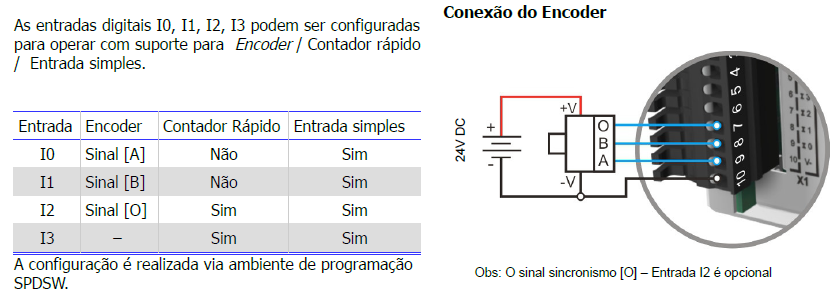
Os controladores da HI Tecnologia que possuem interface para encoder, aceitam sinais do tipo encoder incremental simples, ou seja, encoders não diferenciais, caso o encoder utilizado possuir os sinais A, /A, B, /B, O e /O, basta apenas conectar os sinais A, B, e O nas entradas digitais especificadas pelo módulo do controlador. Por exemplo, no caso do controlador ZAP91X S, a entrada digital I0 recebe o sinal A, a I1 recebe o sinal B e a I2 recebe o sinal O. Neste módulo, é necessário também selecionar em "Configurações do módulo de hardware", a opção para operar a I0, I1 e I2 como encoder.
Encoder no Programa de Aplicação
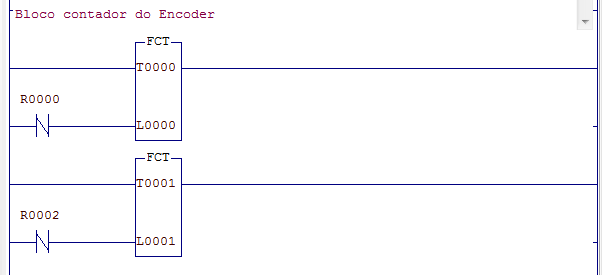
Em sua aplicação ladder, basta utilizar o bloco funcional "FCT", em "Elementos > Hardware > Contador Rápido/Encoder".
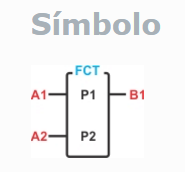
Para o primeiro encoder, utilizar o identificador T0, para os próximos encoders incrementar em 1 o identificador, T1, T2, e assim sucessivamente. Quando ativar o bloco basta ler no parâmetro P2 o valor corrente do contador.
Exemplos de utilização
Alguns "cases" no qual a HI Tecnologia utilizou enconders na aplicação:
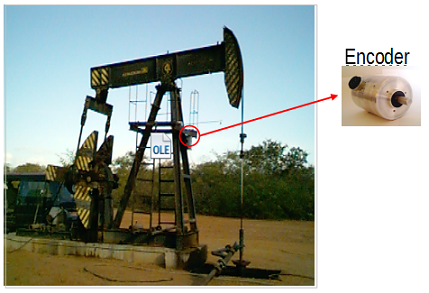
- Aquisição da carta dinamométrica de uma Unidade de Bombeio: O bombeio mecânico corresponde ao método de elevação artificial mais utilizado no mundo em poços de petróleo terrestres. É baseado em um cavalo mecânico, operando com movimentos alternativos gerados por um motor. Na unidade de bombeio, podemos utilizar um encoder para replicar o movimento alternativo do cavalo mecânico a cada ciclo de bombeamento, desta forma, o encoder incrementa os pulsos no ciclo ascendente e decrementa os pulsos no ciclo descendente. A leitura dos pulsos gerados por este encoder disponibiliza a coordenada de posição necessária para geração da carta dinamométrica associada ao poço.
 |
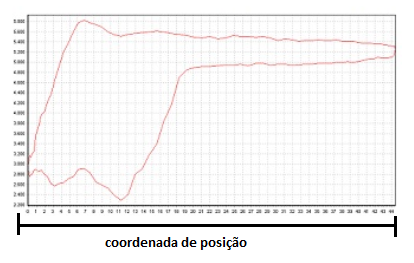 |
| Unidade de bombeio mecânico e localização do enconder utilizado. | Carta dinamométrica do poço utilizando a coordenada de posição gerada por um encoder |
Conheça nosso case sobre Elevação Artificial na Petrobras
- Lapidadora de vidros: Nessa aplicação, utilizamos 2 encoders: um encoder para regular a abertura do mordente que prende a peça de vidro, de acordo com a sua espessura, e outro encoder para identificar a posição da peça de vidro durante a sua movimentação sob a esteira de lapidação.
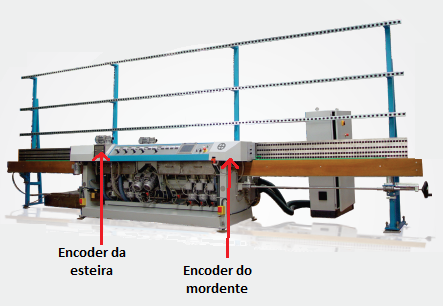 |
| Esteira de lapidação de vidro. |
Quer conhecer nossa linha de CLP's? Faça um orçamento e entenda como podemos te ajudar!
Leia também: HI ministra treinamento sobre comunicação entre CLP´s e inversores de frequência
Treinamento do HIscada Pro é realizado na Faculdade de Engenharia Agrícola da Unicamp
Compartilhe no Facebook Compartilhe no LinkedinCategorias
- Automação Industrial (19)
- Cases (14)
- CLP (33)
- Cursos (13)
- Equipamentos (16)
- Eventos (10)
- HIstudio (8)
- IHM (7)
- Indústria 4.0 (13)
- Prêmios e Certificações (6)
- Programação (10)
- Sistema Supervisório (32)
- Software (18)
- Telemetria (17)
Tags
- Portal de Telemetria (6)
- CLP (15)
- NEON (4)
- medidor de energia elétrica (2)
- PM710 (1)
- PRODIST (1)
- Aneel (1)
- Exata Automação (1)
- desenvolvimento de software (3)
- sistema supervisório (17)
- cursos (6)
- hiscada pro (14)
- case (6)
- telemetria (10)
- palestras (3)
- senai (1)
- unisal (4)
- case hiscada pro (1)
- case clp (7)
- wireless (3)
- case telemetria (4)
- Petrobrás (3)
- monitoramento de dados (6)
- elevação artificial (2)
- programação de clp (5)
- oee (3)
- IHM Touch Screen (1)
- industria 40 (7)
- sensor de luminosidade (1)
- servidor opc (3)
- MplServer (2)
- MODBUS (5)
- CLP modbus (6)
- case esc (1)
- inversor de frequência (1)
- iot (3)
- m2m (1)
- encoder (1)
- automação industrial (8)
- linguagem ST (2)
- linguagem ladder (1)
- iec 61131-3 (1)
- covid19 (1)
- coronavirus (1)
- prevencao (1)
- medidas (1)
- atendimento (1)
- suporte (1)
- vendas (1)
- equipamentos (1)
- automacao (1)
- tecnologia (1)
- transformacao digital (1)
- internet of things (2)
- monitoramento remoto (2)
- coleta de dados (1)
- internet das coisas (1)
- 5g (1)
- telas sinópticas (1)
- editor de sinópticos (1)
- nbiot (1)
- SCADA (1)
- controle de dados (1)
- supervisão (1)
- alarmes (2)
- mqtt (1)
- Protocolo MQTT (1)
- modem (1)
- hardware (1)
- histudio (1)
- programação (1)
Arquivo
2022
- Abril (1)
2021
2020
2019
- Setembro (2)
2018
2017
- Dezembro (1)
- Novembro (1)
- Outubro (1)
- Setembro (6)
- Agosto (2)
- Julho (3)
- Junho (3)
- Maio (4)
- Abril (1)
- Março (3)
- Fevereiro (1)
2016
2015
2014
- Outubro (1)
2013
- Março (1)
2012
- Novembro (1)
2011
- Novembro (1)